

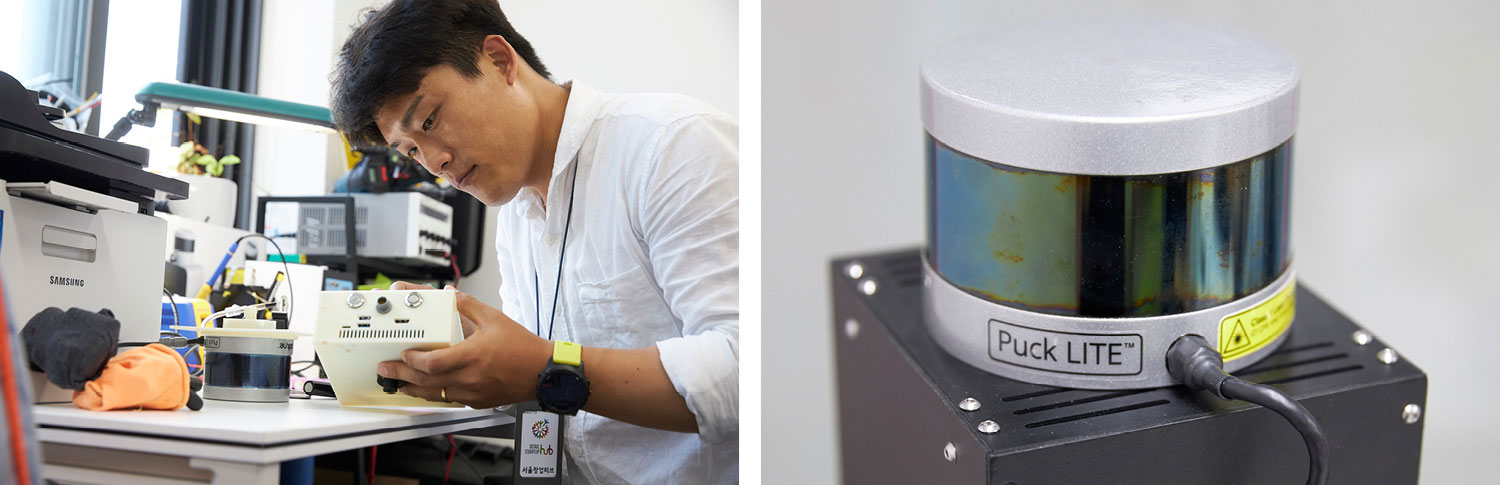
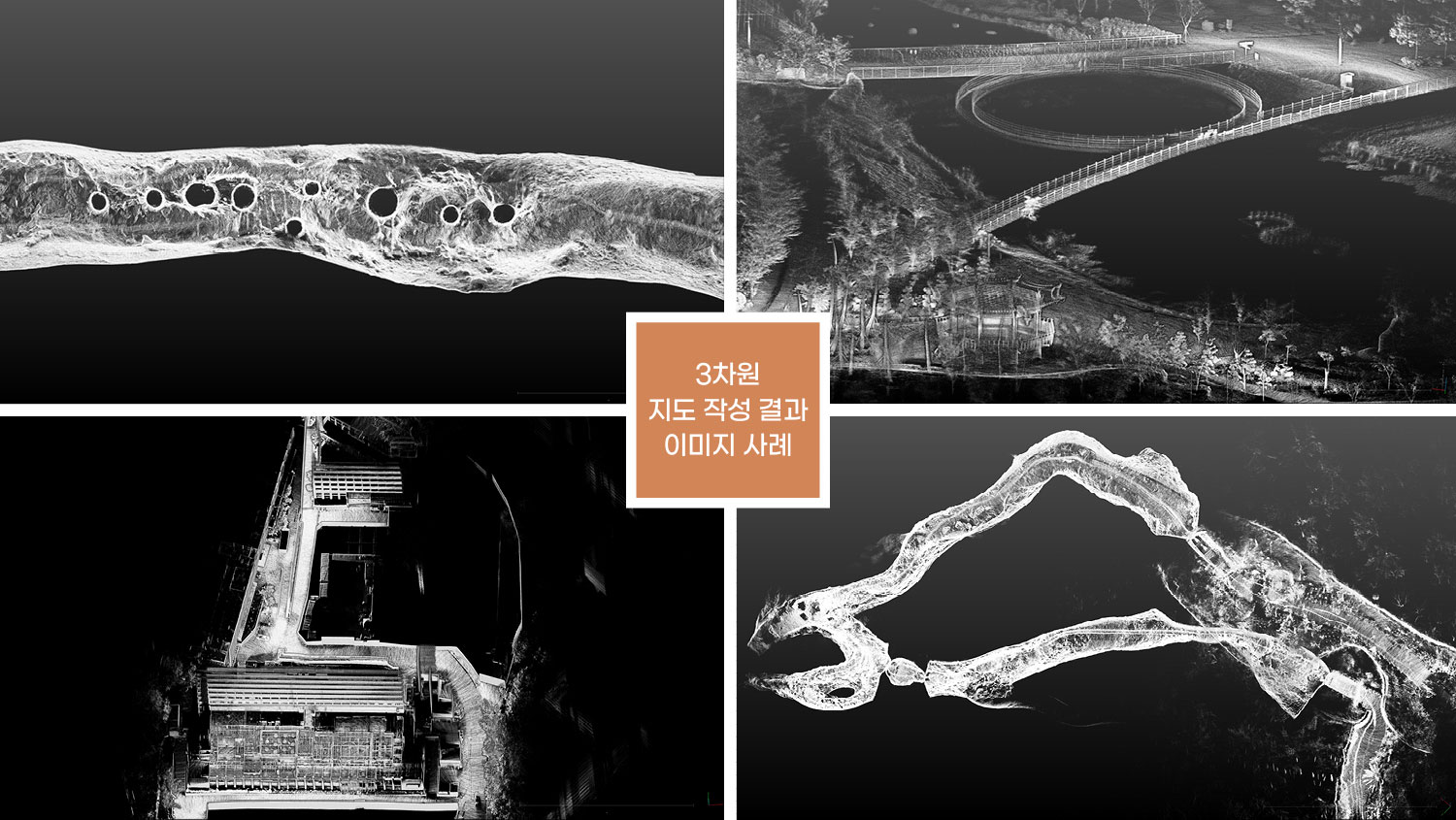
영화 <프로메테우스>를 보면 구체 형태의 드론이 동굴을 이동하며 공간정보를 수집·분석해 3차원 지도를 제작하는 장면이 나온다. 이는 빅데이터와 인공지능 등 여러 가지 첨단 기술을 융복합해 실현한 것이다. 국내에도 영화 속 한 장면과 같은 기술을 개발하는 회사가 있다. 휴대형 3차원 지도 작성 시스템을 개발하고 있는 스타트업, 에이엠오토노미다.
영화 <프로메테우스>를 보면 구체 형태의 드론이 동굴을 이동하며 공간정보를 수집·분석해 3차원 지도를 제작하는 장면이 나온다. 이는 빅데이터와 인공지능 등 여러 가지 첨단 기술을 융복합해 실현한 것이다. 국내에도 영화 속 한 장면과 같은 기술을 개발하는 회사가 있다. 휴대형 3차원 지도 작성 시스템을 개발하고 있는 스타트업, 에이엠오토노미다.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}