
자율주행 기술은 운전자의 보조(Driver-Assistance) 기능에서 출발해 핸즈 오프(Hands-off), 아이즈 오프(Eyes-off), 마인드 오프(Mind-off), 드라이브 오프(Driver-off) 단계로 발전이 예상된다. 그리고 이러한 단계적 발전에 있어 ‘인지-판단-제어’의 기술적 뒷받침이 무엇보다 요구되며, 그 중심에 센서와 지도 기술이 자리한다. 고도화된 센서와 지도는 자율주행차의 완성도를 높이는 핵심으로 날로 진화 중이다.
실시간에 가깝게, 정확하게, 저렴하게: 초정밀지도
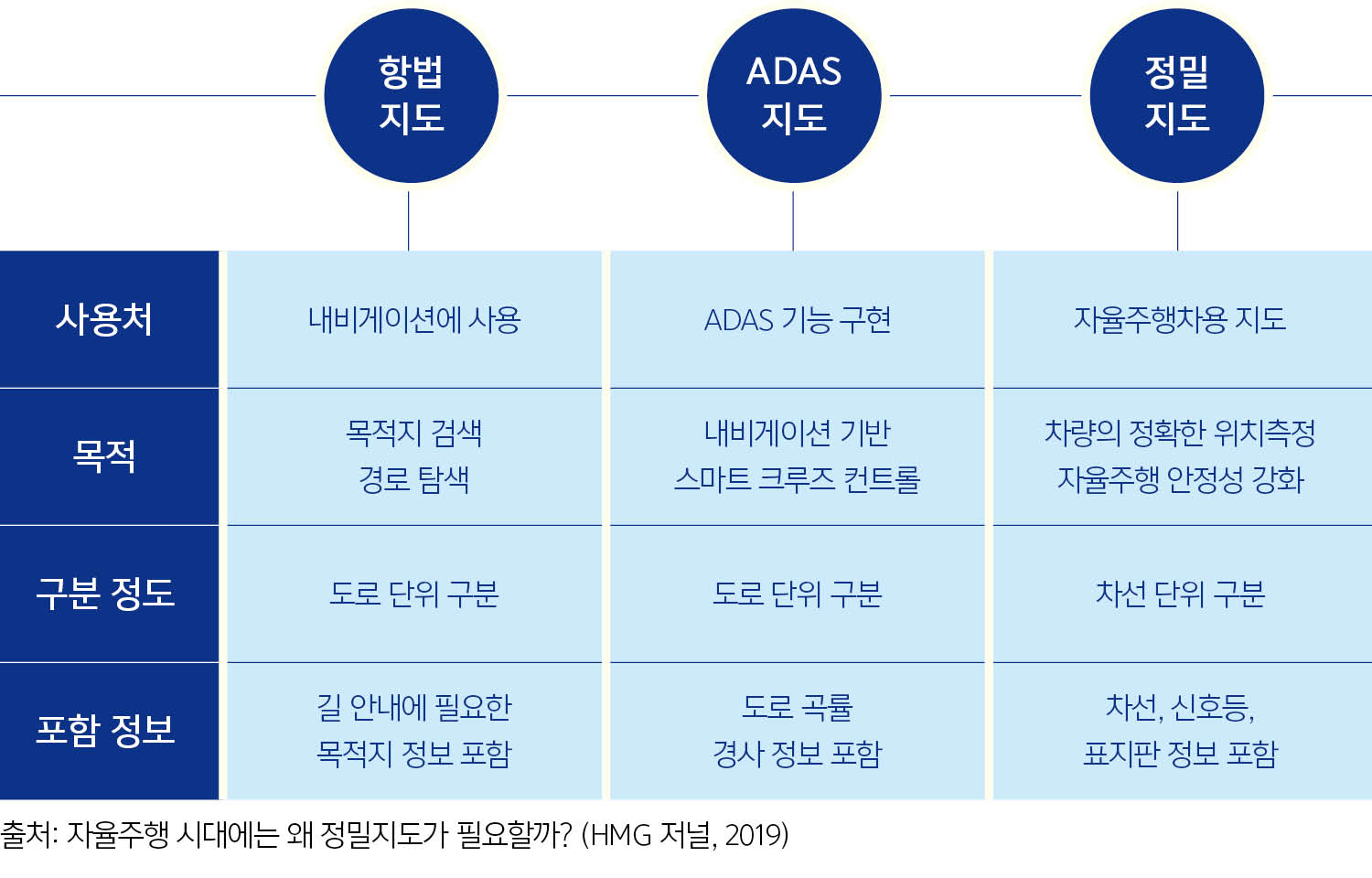
자동차용 지도는 크게 항법지도, ADAS(Advanced Driver Assistant System)지도, 정밀지도로 구분할 수 있다. 우선 항법지도는 일반 자동차나 스마트폰에서 흔히 볼 수 있는 내비게이션에 탑재된 지도이다. 주로 도로 단위의 정보를 표현하는데 목적지를 찾아 그곳까지 향하는 경로를 탐색한다. ADAS지도는 기존 내비게이션에 도로의 곡률과 경사를 추가해 ADAS 기능이 정교하게 작동할 수 있도록 뒷받침한다. 정밀지도는 여기에 차선, 신호등, 표지판 등의 정보를 포함해 자율주행차가 안전하고 안정성 있게 운영될 수 있도록 한다.
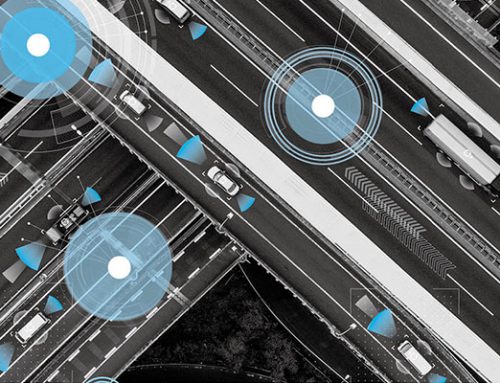
정밀지도 제작을 위해서는 MMS(Mobile Mapping System)가 탑재된 전용 차량이 필요한데, 이 차량에는 주변 환경에 대한 상대거리 정보를 획득할 수 있는 2D 또는 3D 라이다가 장착되어 있고 2개 이상의 GPS가 상대위치를 측정해 정밀도를 높이고 있으며, 차량 속도와 방위각을 통해 터널 안에서도 정확한 위치를 알 수 있는 관성항법장치, 차량의 이동거리를 통해 정확한 거리를 측정하는 DMI(Distance Measuring Instrument), 그리고 다수의 카메라 등 각종 장비가 도로를 돌아다니며 정보를 축적한다. 이렇게 수집된 데이터는 GPS 상시 관측소 데이터와 비교해 오차값을 보정하고 후처리를 한 다음 필요한 데이터를 추출해 정밀지도로 생성된다.
한편, MMS 차량이 24시간 방방곡곡 세밀하게 실시간으로 돌아다니기에는 제한이 있어 정보 수집원을 확대시킬 수 있는 방안으로 도로에 돌아다니는 자동차들을 통해서 동적정밀지도(LDM: Local Dynamic Map)에 필요한 정보를 수집하는 단말기들도 출시되고 있다. 그리고 대상 정보를 인지하고 편집하는 속도를 높이는 동시에 분석의 정확도를 향상시키기 위해 딥러닝, 인공지능 등을 적용하고 있기도 하다.


{kind=link}
{kind=link}
{kind=link}
{kind=link}