

인간은 이동과 정착을 통해 세상을 변화시키고 사회를 발전시켜 왔다. 4차 산업혁명의 시대, 이동에 있어서도 대대적인 변화가 이미 진행되고 있다. 특히 인간에 의해서가 아니라 자동차가 스스로 움직이는 자율주행 시대가 도래한 것이다. 또한 자동차는 더 이상 소유가 아닌 공유의 개념으로 전환되고 있기도 하다. 자율주행차 시대의 흐름을 짚어보고 앞으로 다가올 내일을 예상해보자.

2016년에 전 세계 차량 공유 업체 중 1위로 꼽히는 우버에서 자율주행택시 서비스를 출시하면서 많은 업체가 그 뒤를 잇고 있다.
자율주행 기술 개발은 군사적 목적을 가지고 시작되었다. 1980년 초에 미국의 국방부 산하 방위고등연구계획국(DARPA)에서는 무기의 로봇화, 자율주행화를 구현하기 위하여 20년여간 노력해왔다. 그리고 2004년 무인자동차 경주대회인 DARPA Grand Challenge 개최를 통해 민간에 자율주행 기술의 중요성을 알리고 연구기관의 적극적인 참여를 이끌어내고자 했다.

자율주행 배달로봇의 경우 기술적으 로는 자율주행차와 100% 일치한다. 하지만 세부적으로 살펴보면 차량에 비해 크기가 상대적으로 작고 주행 하는 길이 일반도로, 인도, 비포장도 로 등 다양하다.
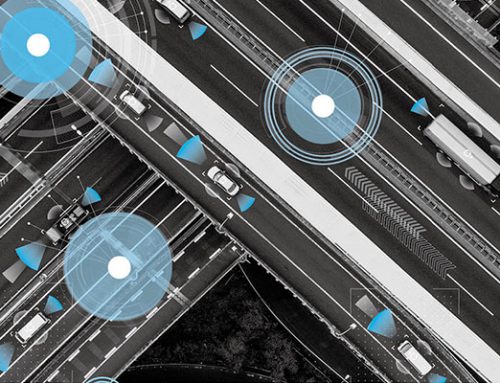
자율주행 기술과 결합된 자동차 공유 서비스는 자율주행택시와 자율주행셔틀을 탄생시켰다. 이 서비스들은 기술적으로는 비슷하지만 어떻게 운용하는지에 따라 갈래가 나뉜다. 그 밖에도 다양한 서비스가 출시되고 있다.

벤츠의 디터 제체 회장은 ‘미래의 자동차는 소프 트웨어로 달린다’라고 발표했다. 그 말인즉, 자율 주행차는 안정적인 하드웨어를 기반으로 한 소프 트웨어의 발전이 필요하며, 자율주행 관련 애플 리케이션이 다수 필요함을 역설한 것이다.


{kind=link}
{kind=link}
{kind=link}
{kind=link}